Lonten Technology
Custom F18518 APM 2.5 2.6 2.8 Optical Flow Sensor V10 No GPS Fixed Point for Improving Flight Control Precision
Custom F18518 APM 2.5 2.6 2.8 Optical Flow Sensor V10 No GPS Fixed Point for Improving Flight Control Precision
Couldn't load pickup availability
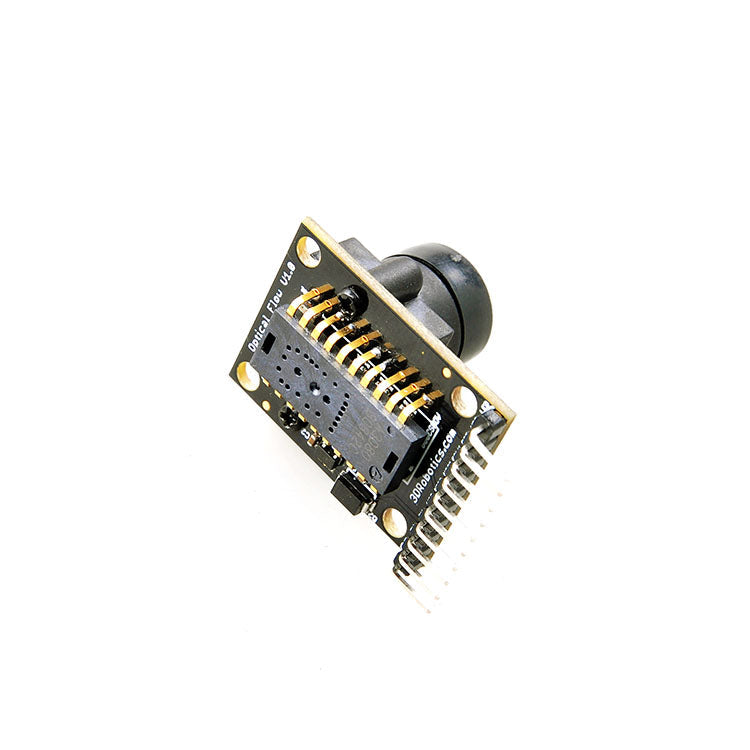
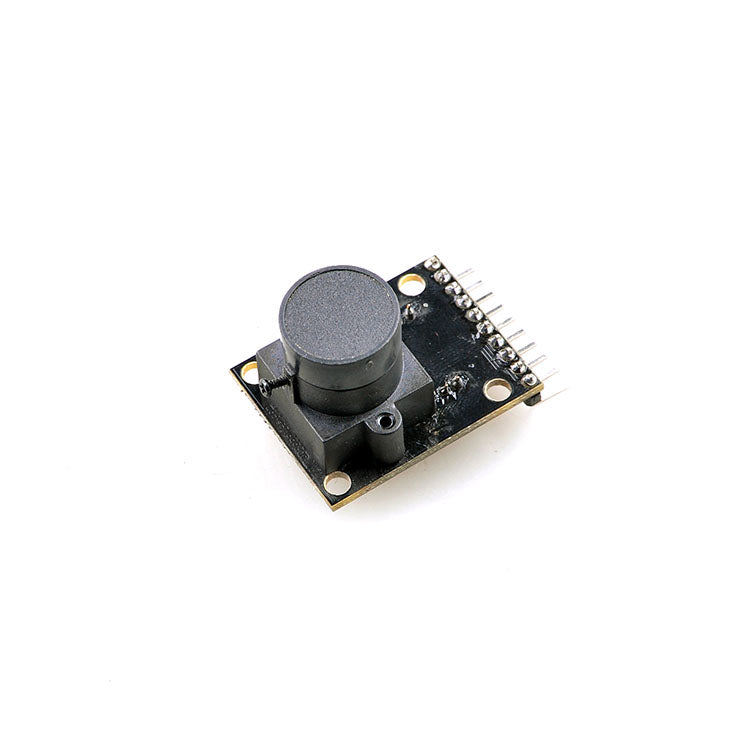
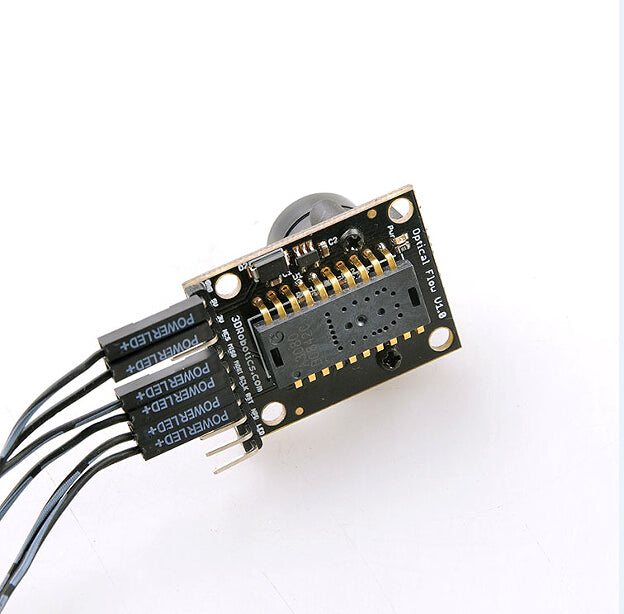
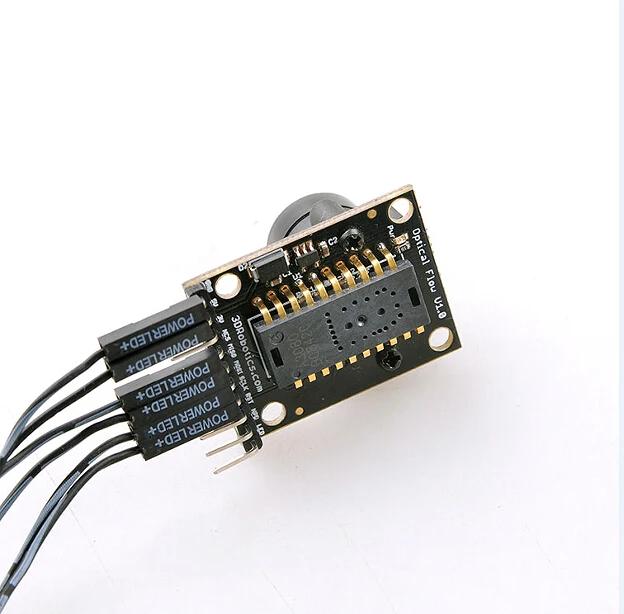
APM 2.5 2.6 2.8 Optical Flow Sensor V10 No GPS Fixed Point for Improving Flight Control Precision
Note:Technical support is not provided.
Description:
- To improve the precision when you can't use GPS, APM: Copter now support optical Flow V1.0 based on mouse sensor
Probelms:
- Sensor can only work under good lighting condition
- Using fixed foucus lens, so it cannot focus lens of objects that within 30cm
- Rotate sensor will make sensor in disorder
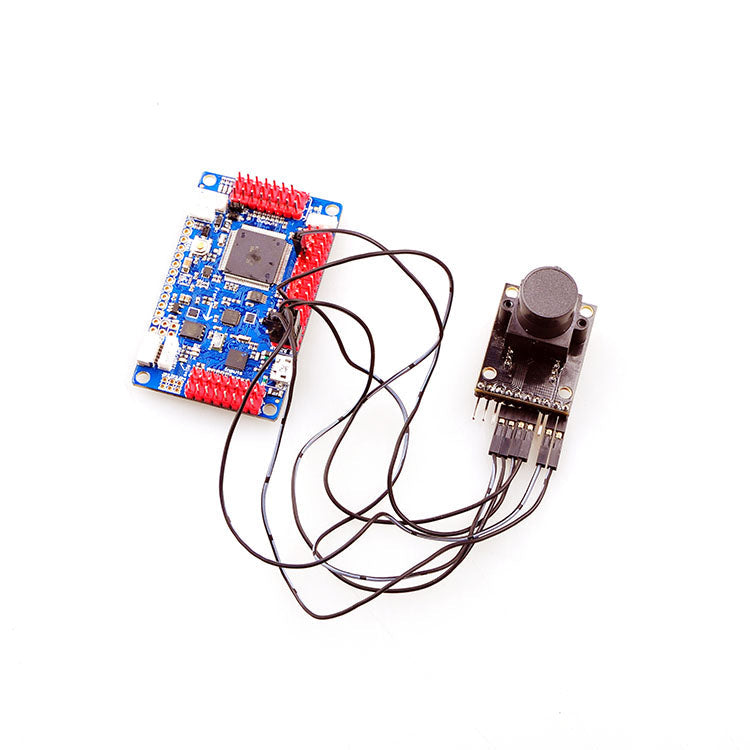
Connecting sensor to APM2.5, APM2.52, APM2.6, APM2.8 all can be used
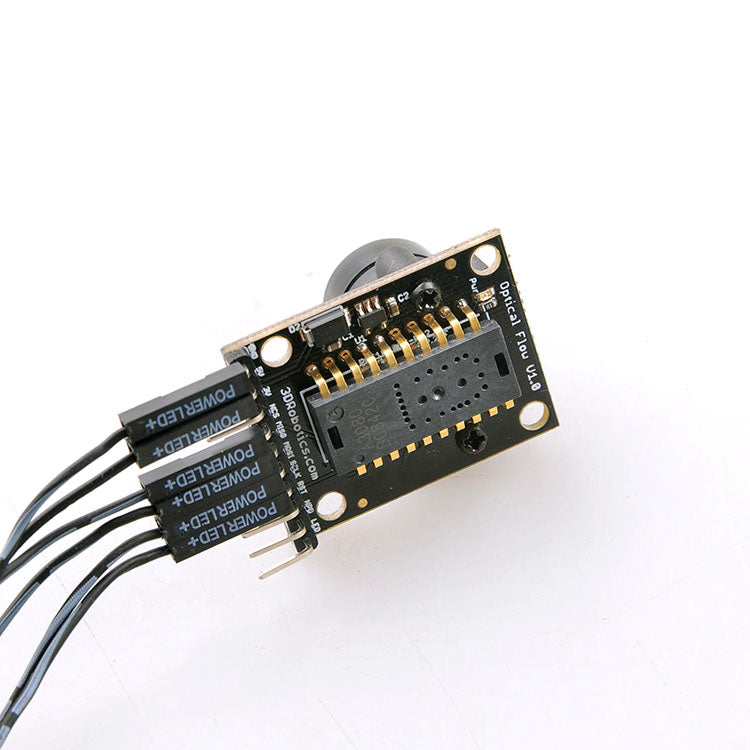
- Connecting with VCC, GND, MISO, MOSI, SCLK, and NCS pins
- Default installation mode is the camera heads down, the pins heads forward

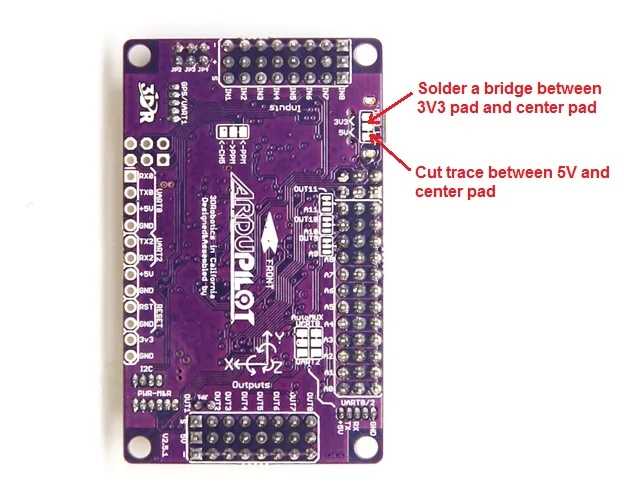
- Disconnect with MISOLVL jumping cable on the back of the board, rewelding the MISO pins at 3.3V voltage. In this way, it won't inteference MPU6000
Testing sensor:
- Update testing sketch to APM:
- If you use APM2, you can download hex files at download zone, then use Mission Planner's original setting> Install Firmware> Load custom firmware connections to your APM2
- If you use APM1, you need to open Arduino IDE and loading AP_OpticalFlow_test.pde, and update it toyour APM1
- Using serial port monitor or AP Mission Planner terminal to connect with APM
- Input 'c', to make sure sthe sensor will respond APM
- Input 'm&apos, start the front or back camera, check the changes of X Y value. If ther is no change, rotate the lens to adjust focal distance

Package included:
APM 2.5 2.6 2.8 Optical Flow Sensor V10 x 1