





Lonten Tech
Custom PCBA ROS robot Visual slam of Ackerman ROS robot chassis radar navigation unmanned vehicle Manufacturer
Custom PCBA ROS robot Visual slam of Ackerman ROS robot chassis radar navigation unmanned vehicle Manufacturer
Couldn't load pickup availability
ROS Educational Robots
Robot platform based on ROS education development, can choose Ackerman/differential, McNamu wheel,omnidirectional wheel, track and other structures. Electronic control can be shared, which can realize map building navigation, autonomous obstacle avoidance, radar following, visual following, visual patrolling, APP image transmission and other functions, and provide a full set of PDF manuals and video tutorials.
Ackerman/Differential Edition
Drive structure:Can freely switch positive Ackerman Anti-Ackerman, differential structure The wheel:Drive wheel:65mm rubber wheel Slave wheel: 60mm metal omni-directional wheel The steering gear:311920KG high torque digital steering gear Size: 240.5*191*146 The car weight:1.8kg Load capacity:3kg Maximum speed:1.2m/s Light load range(Speed 0.45m/s):5.5h The load lasts for 1kg(Speed 0.45m/s):4h The motor:MG513 motor The encoder:AB phase high-precision photoelectric encoder with 500 wire The control mode:APP, PS2 wireless gamepad, CAN, sernial port, etc STM32 master:STM32F103VET6 Laser radar:Silane A1 standard version ROS master:Raspberry Pi 4B (2G+32G) Depth camera: ASRTA Pro RGBD Depth Camera The operating system:STM32 is equipped with Freertos ROS and Ubuntu 18.04+ Melodic data:Full series of development manuals, video tutorials ROS source code, STM32 source code, ROS mirror
Variable structure
Under normal circumstances, if you need to debug the positive Ackerman structure, the anti-Ackerman structure, and the differential car, you may need to purchase 3 carsat the same time. Our car can realize the above 3 cars at the same time through the compatibility and replacement of the structure and code. The function is equivalent to spending a car’s money and buying 3 cars.

McNum wheel edition
Drive structure:Four-wheel McNum wheel construction (with pendulum suspension) The wheel:75 mm aluminum alloy The McNum wheel The steering gear:NO Size: 270*222"187 The car weight:2.9kg Load capacity:6kg Maximum speed:1.4m/s Light load range(Speed 0.45m/s):4h The load lasts for 1kg(Speed 0.45m/s):2.5h The motor:MG513 motor The encoder:AB phase high-precision photoelectric encoder with 500 wire The control mode:APP, PS2 wireless gamepad, CAN, sernial port, etc STM32 master:STM32F103VET6 Laser radar:Silane A1 standard version ROS master:Raspberry Pi 4B (2G+32G) Depth camera: ASRTA Pro RGBD Depth Camera The operating system:STM32 is equipped with Freertos ROS and Ubuntu 18.04+ Melodic data:Full series of development manuals, video tutorials ROS source code, STM32 source code, ROS mirror
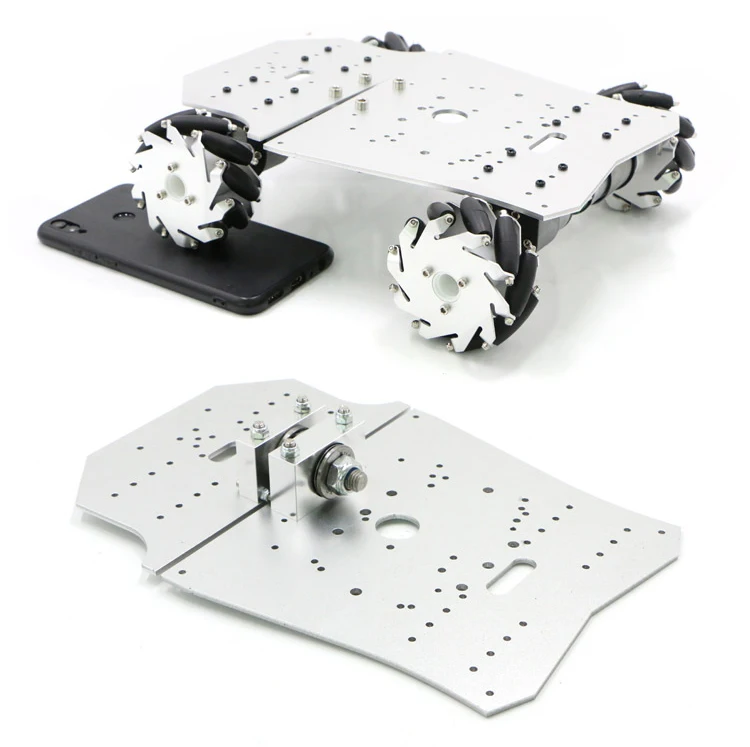
The McNum wheel chassis is equipped with pendulum suspension system
Because three points form a plane, if the bottom plate is rigid, the four-wheel car has an unavoidable problem, easy to appear suspended wheels, unable to normal debugging, not to mention indoor navigation, automatic driving.Under the premise of aluminum alloy base plate, our car is equipped with coaxial pendulum suspension system, which can adapt to uneven ground.
Omni-directional wheel version
Drive structure:Three-wheel omnidirectional construction The wheel:60mm Metal omnidirectional wheel The steering gear:NO Size: 240"240*183 The car weight:2.18kg Load capacity:3kg Maximum speed:0.84m/s Light load range(Speed 0.45m/s):5h The load lasts for 1kg(Speed 0.45m/s):3h The motor:MG513 motor The encoder:AB phase high-precision photoelectric encoder with 500 wire The control mode:APP, PS2 wireless gamepad, CAN, sernial port, etc STM32 master:STM32F103VET6 Laser radar:Silane A1 standard version ROS master:Raspberry Pi 4B (2G+32G) Depth camera: ASRTA Pro RGBD Depth Camera The operating system:STM32 is equipped with Freertos ROS and Ubuntu 18.04+ Melodic data:Full series of development manuals, video tutorials ROS source code, STM32 source code, ROS mirror
Caterpillar vehicles version
Drive structure: Two-drive crawler mechanism (with independent suspension and shock absorption) The wheel:Aluminum alloy crawler wheel The steering gear:NO Size: 270*270"160 The car weight:2.54kg Load capacity:4kg Maximum speed:1m/s Light load range(Speed 0.45m/s):5.5h The load lasts for 1kg(Speed 0.45m/s):4h The motor:MG513 motor The encoder:AB phase high-precision photoelectric encoder with 500 wire The control mode:APP, PS2 wireless gamepad, CAN, sernial port, etc STM32 master:STM32F103VET6 Laser radar:Silane A1 standard version ROS master:Raspberry Pi 4B (2G+32G) Depth camera: ASRTA Pro RGBD Depth Camera The operating system:STM32 is equipped with Freertos ROS and Ubuntu 18.04+ Melodic data:Full series of development manuals, video tutorials ROS source code, STM32 source code, ROS mirror
Raider buggies version
Drive structure: Four wheel independent drive (with pendulum suspension) The wheel:65mm Drift car rubber wheel The steering gear:NO Size: 270*222*187 The car weight:2.68kg Load capacity:6kg Maximum speed:1.2m/s Light load range(Speed 0.45m/s):4h The load lasts for 1kg(Speed 0.45m/s):2.5h The motor:MG513 motor The encoder:AB phase high-precision photoelectric encoder with 500 wire The control mode:APP, PS2 wireless gamepad, CAN, sernial port, etc STM32 master:STM32F103VET6 Laser radar:Silane A1 standard version ROS master:Raspberry Pi 4B (2G+32G) Depth camera: ASRTA Pro RGBD Depth Camera The operating system:STM32 is equipped with Freertos ROS and Ubuntu 18.04+ Melodic data:Full series of development manuals, video tutorials ROS source code, STM32 source code, ROS mirror
Provision of Information in English
Provision of Information in English
Some functions of the robot are listed as follows:
1.Low level ROS serial communication 2.Reserved CAN communication interface 3.IMU and odometer data feedback 4.Battery voltage detection and voltage alarm 5.MPU9250 nine-axis attitude sensor 6.Support serial port one key download 7.A1 radar frequency stepless regulation 8.Gyroscope zero drift clearance 9.Keyboard node control 10.APP gravity sensing control 11.APP adjusts PID parameters 12.OpenCV applications and tutorials 13.Robot dynamic obstacle avoidance 14.Robot fixed point navigation and multi-point navigation 15.TEB and DWA path planning 16.ROS APP diagram transfer and control 17.The Web browser displays the camera image 18.Laser radar mapping navigation 19.RTAB pure visual mapping navigation 20.RTAB Vision + Radar Map Navigation 21.Gmapping built figure 22.Hector built figure 23.Karto built figure 24.Cartographer built figure 25.TensorFlow object recognition 26.Lidar following 27.Depth visual following 28.KCF follow 29.AR tag recognition 30.RGB visual patrol (Fusion Radar Obstacle Avoidance) 31.ROS APP drawing 32.ROS APP navigation 33.RRT made its own drawings
Provide video tutorials, develop tutorials
1.Covering ROS basics, STM32 low-level control, ROS development, Ubuntu tutorials, etc 2.Provide video tutorials on ROS development 3.Brand new motor PID video tutorial Theoretical analysis ·C language implementation · control schematic diagram · complete code · video explanation
Newly launched BT &WiFi version of APP
1. Support gravity induction remote control and two-hand button remote control mode. 2. Support 5-channel waveform display interface, you can view waveform at any time without data line. 3. Support 9-channel parameter adjustment interface, support PID parameteronline adjustment and power down saving. 4. Optimize the electric quantity alarm mechanism, APP accuratelypushes low voltage alarm notification to avoid over-discharge of batteries. 5. Support BLE BT 4.0 module. 6. Support the latest version of Android system.
Introduction to key functions
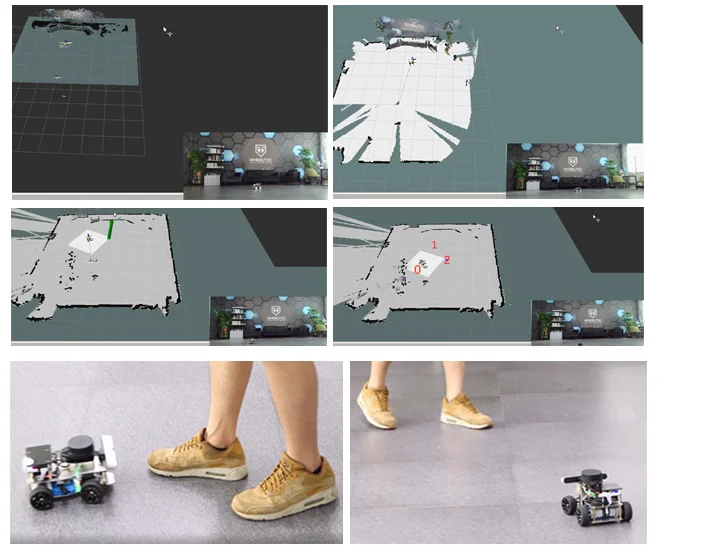
RTABMAP vision and laser radar mapping navigation
Supports visual SLAM, GMapping, HECTOR, Karto, Google Cartographer and other algorithms for map construction. Support fixed point navigation, multi-point navigation. Lidar following The laser radar can follow any object including people in all directions
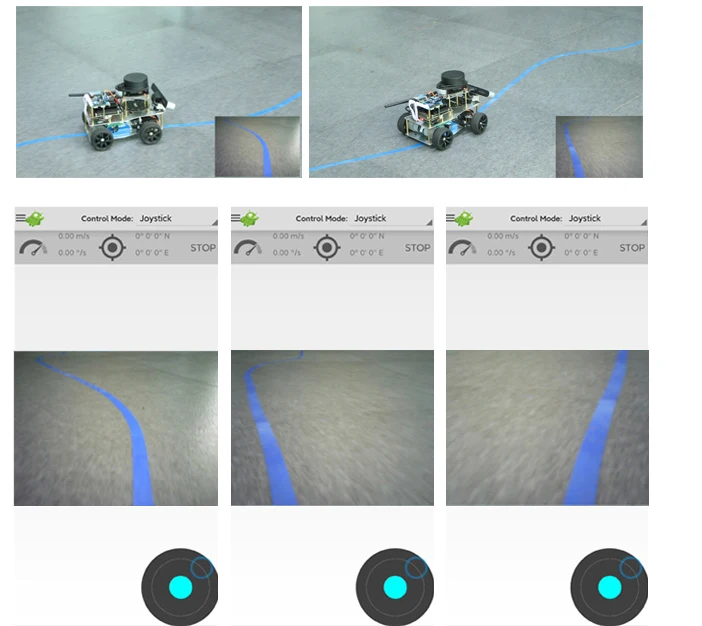
Visual patrol&Support APP to display camera images
The camera can be navigated by sticking lines,General electrical glue can be, the patrol color is blue, black, red, green, yellow and other adjustable APP can control when the camera image is displayed in the phone, to the first time control
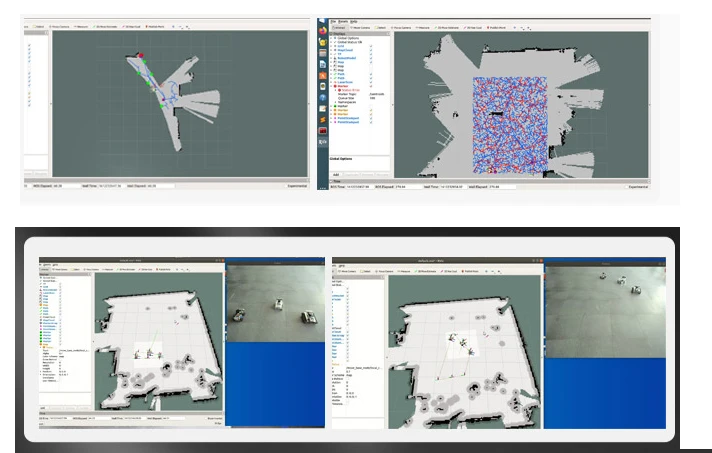
RRT independent exploration and mapping&Robot formation
No need to control the car, using the RRT algorithm to independently complete the exploration of map building, save the map, return to the starting point Multi-machine cooperative operation, distributed formation control, support single point and multi-point navigation function
The PS2 wireless controller comes standard
The motherboard is reserved for PS2 handle receiver socket Speed and steering can be controlled using the PS2 joystick, and speed can be stepless adjusted through the joystick

12V motor parameters
Rated voltage:12V Rated power:4.32W Motor type: permanent magnet brush Locked rotor current: 2.8A Locked-rotor torque :10kgf.cm Rated current :360mA Rated torque :1.0kgf.cm Speed before deceleration: 11000rpm Speed after deceleration: 366± 10rpm Reduction ratio :1:30 Output shaft: diameter 6m, D-shaft eccentric shaft
Steering gear parameters
The steering gear::HWZ020 Maximum Angle:180° Voltage:4.8-7.4V The torsion:15.3kg.cm (5V) 20kg. cm(6.5V) Reaction speed:0.14sec/60° Steering gear type::Digital servo Gear::Metal gear Weight:59.6g Work dead zone:3us
The mainboard
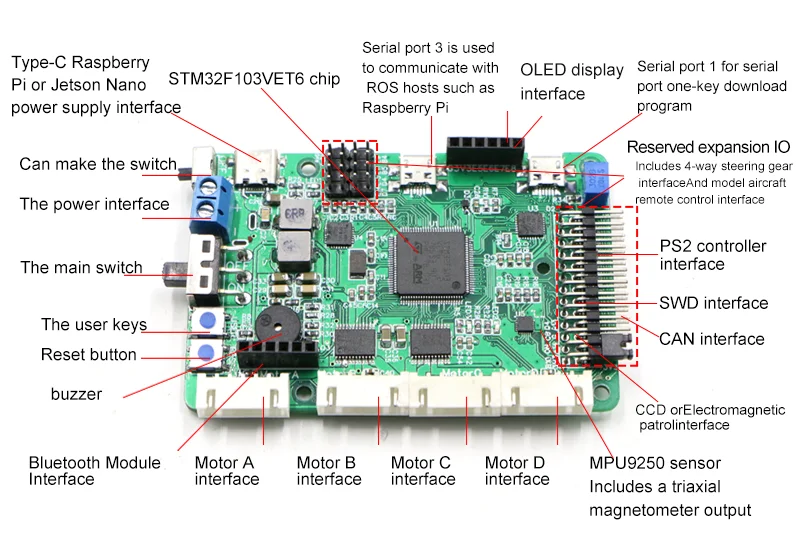
The hardware list
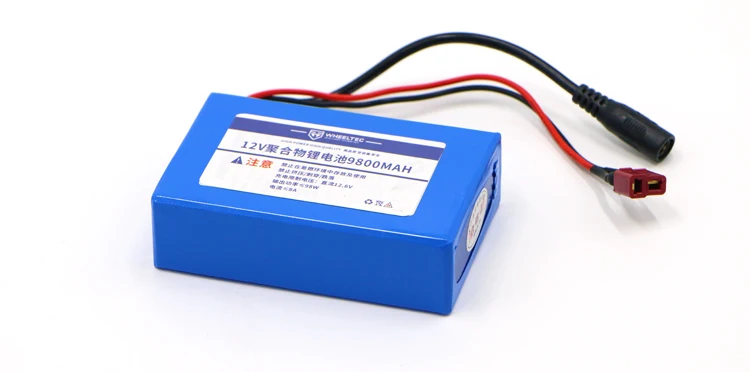
Power supply with protective lithium battery
We work with tier one battery suppliers. Capacity upgrade to 6Ah, equipped with special charger over discharge, over impact, short circuit, overvoltage and other multiple protection.
Shipping list
Ackerman/differential version chassis 12V30F MG513 Motor *2 37 Motor bracket*2 Hexagon coupling-6mm*2 Black rubber wheels* 4 Steering horn assembly*2 Steering horn press*2 Ball head pull rod short *1 Ball head pull rod long *1 Steering gear rocker arm*1 Steering disc*1 Steering gear*1 Steering gear multifunctional support*1pcs Aluminum alloy bottom plate of car*1pcs Aluminum alloy top plate of car*1pcs Omnidirectional wheel assembly module*1pcs Standard parts and connectors McNum Wheel/Rider Buggy chassis Replace McNum wheels and flange couplings with 65mm rubber wheels and hexagonal couplings for buggy chassis 12V30F MG513 Motor*4 37 Motor bracket*4 75mm aluminum alloy McNum wheel*4 Metal flange coupling*4 Aluminum alloy plate on top of car*1pcs Aluminum alloy bottom plate of car*1pcs Swing-type suspension mechanism a set of Standard parts and a plurality of connecting parts thereof Omnidirectional wheel version chassis 12V30F MG513 motor *3 37 Motor bracket *3 60mm aluminum alloy McNum wheel *3 Metal flange coupling *3 Aluminum alloy bottom plate of trolley *1PCS Aluminum alloy plate *1PCS on the upper layer of the trolley And a number of standard parts and connectors thereof Tracked car version chassis 12V30F MG513 Motor*2 37 Motor bracket *2 Chassis*1 side plate*2 L-type connector*6 driving wheel connecting rod *8 Pull spring *8 driving wheel module *2 Drive wheel module *10 tracks *2 And a number of standard parts and connectors thereof
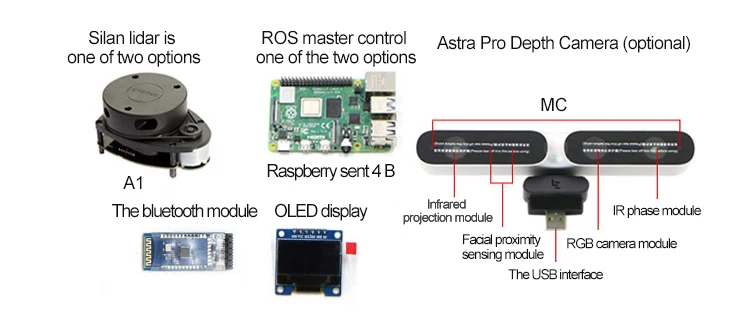
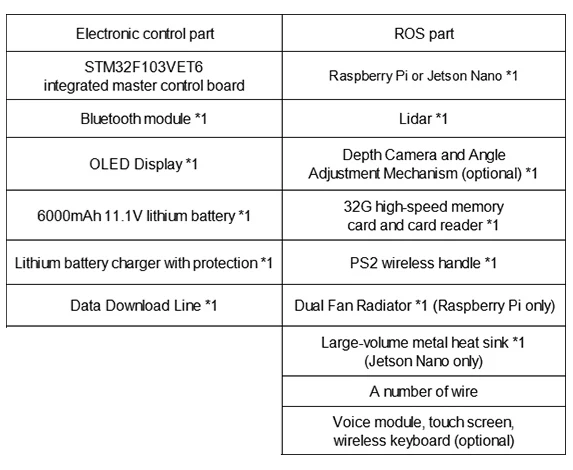
Electronic control and ROS parts

Welcome Customize Order!




