Lonten Tech
Custom 1PCS SAMIORE ROBOT L9110S DC Stepper Motor Driver Board H Bridge L9110
Custom 1PCS SAMIORE ROBOT L9110S DC Stepper Motor Driver Board H Bridge L9110
Couldn't load pickup availability
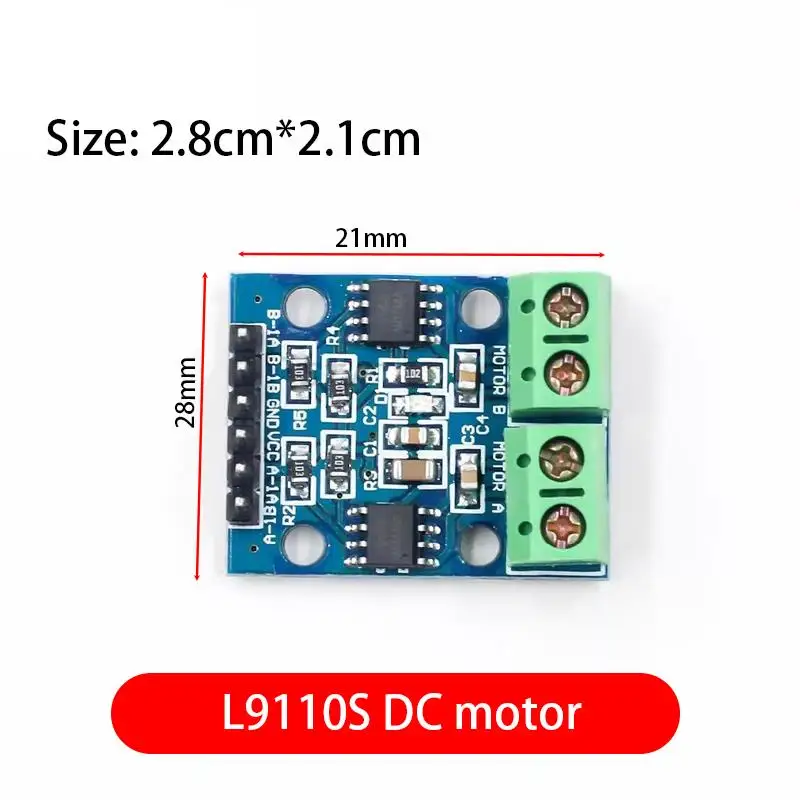
L9110S DC motor/stepper motor drive board, motor drive board,H bridge motor drive
One-module description
1 Double L9110S chip motor drive
2 Module Power supply voltage: 2.5-12V
3 Suitable motor range: the working voltage of the motor is between 2.5v-12V, and the large working current is 0.8A. The voltage and current of the smart car on the market are in this range
4 can drive two DC motors at the same time, or a 4-wire 2-phase stepper motor.
5 PCB board size: 2.8cm*2.1cm ultra-small volume, suitable for assembly
6 Fixed mounting holes, diameter: 3mm
Description of the interface of the second module
【6P Black bent pin Description 】
1 VCC external 2.5V-12V voltage
2 GND External GND
3 IA1 External MCU I/O port
4 IB1 External microcontroller I/O port
5 IA2 External MCU I/O port
6 IB2 External microcontroller I/O port
【4P green terminal Description 】
1 OA1 OB1 Connect DC motor 2 pins, no direction
2 OA2 OB2 Connect DC motor with 2 pins, no direction
Three module instructions
When the VCC is connected, the power indicator of the GND module is on
IA1 input high level, IA1 input low level, [OA1 OB1] motor forward;
IA1 input low level, IA1 input high level, [OA1 OB1] motor reversal;
IA2 input high level, IA2 input low level, [OA2 OB2] motor forward;
IA2 input low level, IA2 input high level, [OA2 OB2] motor reversal;
Reference code:
int a1=17;
int b1=11;
int a2=10;
int b2=12;
int c1=7;
int d1=5;
int c2=8;
int d2=6;
void setup()
{
pinMode(a1,OUTPUT);
pinMode(a2,OUTPUT);
pinMode(b1,OUTPUT);
pinMode(b2,OUTPUT);
pinMode(c1,OUTPUT);
pinMode(c2,OUTPUT);
pinMode(d1,OUTPUT);
pinMode(d2,OUTPUT);
}
void loop()
{
for(char i=0; i<10; i++)
{
digitalWrite(a1,HIGH);
digitalWrite(a2,LOW);
digitalWrite(b1,HIGH);
digitalWrite(b2,LOW);
digitalWrite(c1,HIGH);
digitalWrite(c2,LOW);
digitalWrite(d1,HIGH);
digitalWrite(d2,LOW);
delay(50);
}
for(char i=0; i<10; i++)
{
digitalWrite(a1,LOW);
digitalWrite(a2,HIGH);
digitalWrite(b1,LOW);
digitalWrite(b2,HIGH);
digitalWrite(c1,LOW);
digitalWrite(c2,HIGH);
digitalWrite(d1,LOW);
digitalWrite(d2,HIGH);
delay(50);
}
}